選 別
Sorting



ワークの形状や大きさ、重量等の基準値をプログラムし、カメラでワークの画像認識を行い選別します。ロボットハンドもワークに合わせて設計し、ワークにダメージを与えることなくハンドリングします。
大葉選別装置

サイズ別に規定枚数を
同じ向きで重ねて払い出し
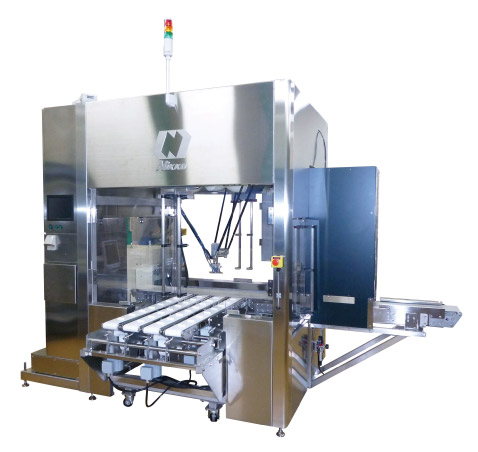
本システムは、人手により大葉をコンベアに投入すると、カメラで大葉の画像処理を行い、L・M・Sの3サイズに選別し、ロボットが高速でサイズごとに規定枚数を段積みします。
システム例
| ロボット | パラレルリンクロボット 1台 |
|---|---|
| 能力 | 100枚/分 |
| 構成例 | ビジョンシステム・ベルトコンベア 桟付ベルトコンベア |
| 導入効果 |
省人化効果 3名 → 1名 労働生産性 2.5倍 |
その他の納入事例
