実証試験 TESTING
設備紹介
パラレルリンクロボットは、2本セットのアーム3対(あるいは4対)で1つの先端の支持するタイプのロボットです。
先端にはワークを吸い付けて搬送するための吸着ユニットなどが取り付けられます。細く軽量なアームでも十分な剛性を確保できるため、非常に素早い動作が可能です。ベルトコンベヤーなどの上などに取り付けられ、流れてくる製品を高速でピックアップして搬送できます。
弊社ではワークの選別、整列、トレー移載、放送期への移載など、高速ハンドリングが必要な作業で使用しています。


垂直多関節ロボットには人間で言う肩や肘、手首のような関節があり、人の腕と同様に複雑な動きが可能です。
人の腕は7軸の自由度を持つと言われます。垂直多関節ロボットは6軸可動のものが多いですが、4、5軸や7軸のものもあります。汎用性が高いため、食品工場、物流拠点や部品加工工場などさまざまな現場で活用されています。
軸数が多いと動きの幅が広がり、腕を折り曲げれば狭い場所でも効果的に使えますが、複雑になる分使いこなすのが難しくなります。ロボットの大きさも数多くありますので、ワークや設置スペースに合わせた選択ができます。


スカラロボットは、水平方向の2つの回転軸と、垂直方向の1つの直線軸で構成されるロボットです。この3軸に加えて手首にも水平の回転軸を持たせた4軸の製品が最も一般的です。
ものをつかみ上げる場合、水平方向の軸回転の組み合わせでハンドを対象物の真上まで動かし、垂直の直線軸でハンドを近づけます。
複雑な動作ができる垂直多関節ロボットと違って真上からの作業しかできませんが、水平方向への柔軟性と垂直方向への剛性(変形のしにくさ)を両立できるため、ワークの箱詰め作業等に適しています。



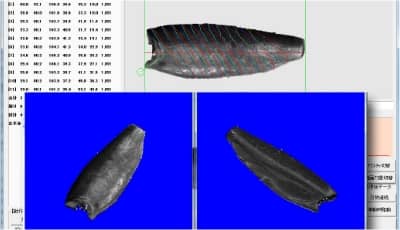
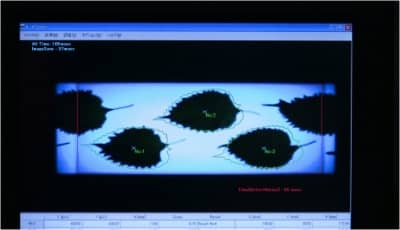
画像処理とは人の目の代わりに様々な判定・計測を可能にするため、自動機やロボット制御に欠かせない技術要素。
最近の画像処理装置は、ユーザーフレンドリーな機器が数多く販売されているため、複雑な処理をしない用途であれば、比較的導入しやすいですが、画像処理を使用する上で重要な基礎であり、ノウハウを必要とされる技術が「光学系技術」です。
光学系技術は画像処理を使用するうえで重要な基礎になります。認識制度やロバスト性を上げるには、レンズ・照明などの技術習得やノウハウが必要になります。